Simscape Multibody -- 建立一个杆件模型


执行,打开simscape, 如图

目的是建立一个杆件,所以需要两个坐标系,杆件的两端各有一个坐标系。

这个代表坐标系。

这个是杆件的形状、属性等的参数设置。
按照下图的设置。
双击

,

添加一个坐标系。按住ctrl拖动界面上的坐标系即可。

拖动完成后一定要注意标箭头的几个地方,B代表base,所以B端都要指向 下面的Solid模块。选中左面的坐标系,按ctrl+R旋转。

配置两个端面的坐标系。分别双击Rigid Transform模块,配置坐标系的偏移。对于一个杆件来说,两个坐标系分别沿着杆件的X轴偏移L/2的长度。其中一个沿着-X偏移,一个沿着+X偏移。


连线

为了这个杆件的模块更抽象,类似封装成函数的样子,我们把这个杆件的模块生成一个子模块,就是把两个坐标系,一个Solid本体模块合为一体,因为这三个模块刚好能组成一个带坐标系的杆件。
按住shift选中三个模块,右击,选择 create subsystem from selection。

Conn1和2分别是那两个坐标系。
还记得前面定义的那些参数吗,只定义了但是还没初始化呢,就像C++里面声明了还没用呢,所以现在要初始化参数。在Subsystem1上右击选择 Mask, create mask. mask的作用类似于封装成一个C++ private的方法。
打开后选择Parameters & Dialog, 点击5下Edit,然后配置成如图

OK结束。
现在完成了函数的封装,还没初始化,现在初始化。 双击Subsystem1模块,弹出下面的对话框。


框的顺序对应着edit的顺序。初始化。
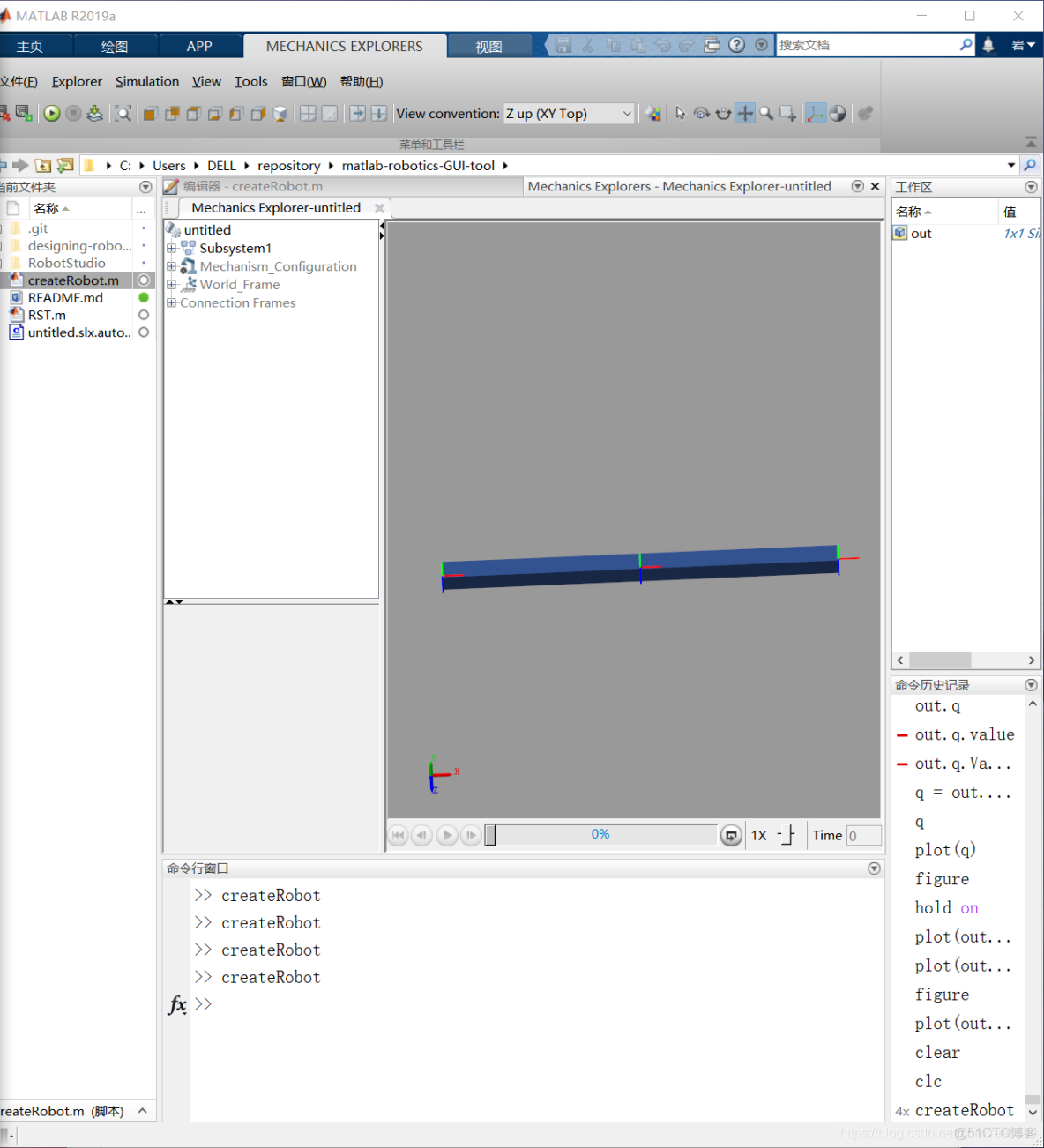
现在生成可视化的模块。点击Simulation选项卡,选择Update diagram。这时候就会在matlab主窗口生成可视化模块。
现在,我们把这个杆件模块保存成一个单独的模块以便日后使用。
在Subsystem1上右击,选择open in new window,点击保存,重命名。